
O que é um CLP? Um guia completo para iniciantes sobre controladores lógicos programáveis.
Um CLP (Controlador Lógico Programável) é um computador digital robusto de nível industrial, projetado para automatizar processos eletromecânicos em fábricas, máquinas e infraestrutura. Ao contrário dos computadores comerciais comuns, os CLPs são construídos para suportar condições industriais severas: temperaturas extremas, umidade, poeira, ruído elétrico e vibração.
A função do CLP é simples: ele lê as entradas, toma decisões com base na lógica programada e controla as saídas. Pense nele como o "cérebro" de uma máquina ou processo — quando um botão é pressionado (entrada), o CLP decide o que deve acontecer (lógica) e ativa um motor, válvula ou indicador (saída).
Antes dos PLCs, a automação industrial dependia de painéis de relés — grandes gabinetes repletos de centenas ou milhares de relés eletromecânicos, temporizadores e contatores. Os problemas incluíam: a necessidade de refazer a fiação fisicamente para qualquer alteração (levando dias ou semanas), o desgaste mecânico causando tempo de inatividade, a dificuldade de solucionar problemas, a enorme necessidade de espaço e a ausência de capacidade de coleta de dados.
Em 1968, a Bedford Associates (posteriormente Modicon) desenvolveu o primeiro CLP (Controlador Lógico Programável) — o Modicon 084 — para a fábrica de transmissões Hydra-Matic da General Motors. O objetivo era simples: substituir os painéis de relés por um sistema eletrônico programável que pudesse ser reconfigurado rapidamente quando a produção mudasse. Em uma década, os CLPs já haviam substituído em grande parte os painéis de relés no mundo todo.
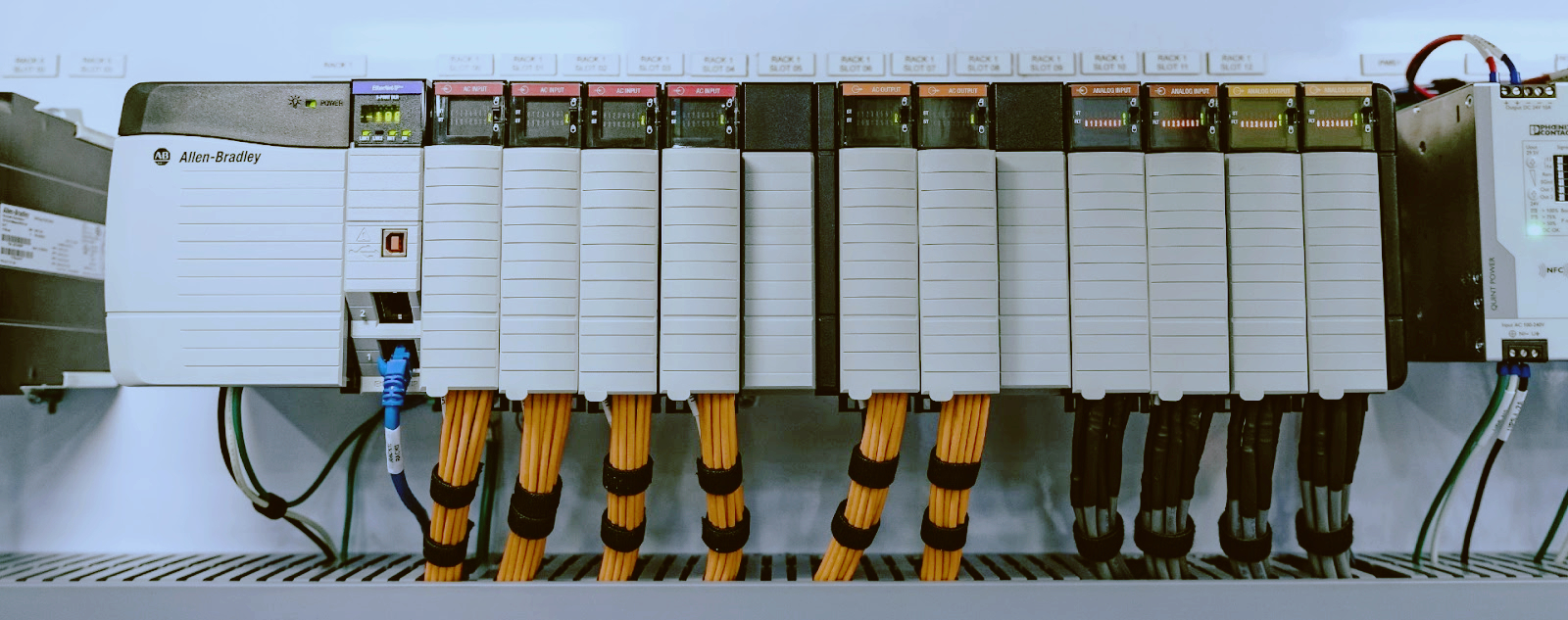
1. CPU (Unidade Central de Processamento): O "cérebro" do CLP — um microprocessador que executa o programa de controle, realiza operações aritméticas e lógicas e gerencia a comunicação. As principais especificações incluem tamanho da memória, tempo de varredura (ms), capacidade de E/S e portas de comunicação (Ethernet, USB, RS-232/RS-485).
2. Fonte de alimentação: Converte a energia da rede elétrica CA (110 V/220 V CA) nas tensões CC necessárias para a CPU e os módulos de E/S (normalmente 24 V CC). Considerações críticas: potência nominal, redundância para aplicações críticas e faixa de tensão de entrada.
3. Módulos de Entrada: Conecte sensores e interruptores à CPU do CLP, convertendo sinais do mundo real em dados digitais. As entradas digitais (24 V CC) aceitam botões de pressão, chaves fim de curso, sensores de proximidade e pressostatos — representando apenas LIGADO (1) ou DESLIGADO (0). As entradas analógicas lidam com sensores de temperatura (RTD, termopar), transdutores de pressão, medidores de vazão e sensores de nível com sinais como 4-20 mA ou 0-10 V.
4. Módulos de Saída: Recebem comandos da CPU e controlam atuadores. Saídas digitais (24 V CC, 120 V CA ou relé) controlam válvulas solenoides, contatores, partidas de motores, luzes indicadoras e alarmes. Saídas analógicas acionam inversores de frequência (VFDs), válvulas proporcionais e servomotores com sinais padrão como 4-20 mA ou 0-10 V.
5. Rack/Painel Traseiro: A infraestrutura física que mantém todos os módulos do CLP juntos e fornece o barramento de comunicação entre eles.
6. Interfaces de comunicação: Os PLCs comunicam-se com IHMs, outros PLCs, inversores de frequência e redes da planta através de protocolos como EtherNet/IP, PROFINET, Modbus TCP/IP, PROFIBUS, DeviceNet, ControlNet, OPC UA e conexões seriais (RS-232/RS-485).
A CPU executa seu programa em um loop contínuo e repetitivo chamado ciclo de varredura. Cada ciclo completo consiste em quatro etapas:
Etapa 1 – Leitura de entradas: A CPU lê todos os estados dos módulos de entrada e os armazena na tabela de imagens de entrada (normalmente de 1 a 10 ms).
Etapa 2 – Executar o programa: A CPU executa o programa do usuário uma instrução por vez, lendo e escrevendo nas tabelas de imagens de entrada/saída na memória.
Etapa 3 – Gravar saídas: Após a execução do programa, a CPU atualiza todos os módulos de saída simultaneamente com os valores da tabela de imagens de saída.
Etapa 4 – Manutenção: A CPU executa tarefas internas, incluindo comunicação HMI/PLC, funções baseadas em tempo e diagnósticos.
O tempo de varredura típico é de 5 a 20 ms para um programa de tamanho médio; aplicações de alta velocidade podem exigir de 0,5 a 1 ms.
1. Diagrama de contatos (Ladder Diagram - LD) – A linguagem mais popular, especialmente na América do Norte. Projetado para se parecer com esquemas de relés elétricos, tornando-o intuitivo para eletricistas. Ideal para lógica discreta e controle sequencial.
2. Diagrama de Blocos Funcionais (FBD) – Utiliza blocos gráficos com conexões de entrada/saída. Cada bloco executa uma função específica — laços PID, operações aritméticas, portas lógicas, temporizadores. Ideal para controle de processos e laços PID.
3. Texto Estruturado (ST) – Linguagem de alto nível baseada em texto, semelhante a Pascal ou BASIC. Mais poderosa para processamento de dados complexos, processamento em lote e máquinas de estado avançadas.
4. Diagrama de Função Sequencial (DFS) – Linguagem gráfica para definir processos sequenciais — operações que ocorrem em etapas com ações e transições controladas. Ideal para processos em lote e máquinas de embalagem.
5. Lista de Instruções (IL) – Linguagem de baixo nível baseada em texto, semelhante à linguagem assembly. Compacta e eficiente, porém menos legível. Ideal para rotinas simples e compactas e sistemas legados.
PLC: Projetado para manufatura discreta (máquinas individuais, linhas de montagem). Tempos de leitura rápidos, hardware robusto. Escala: centenas a milhares de pontos de E/S.
Sistema de Controle Distribuído (DCS): Projetado para indústrias de processos contínuos (petróleo e gás, química, geração de energia). Altamente redundante e integrado às variáveis do processo. Escala: de milhares a centenas de milhares de pontos de entrada/saída.
Computador Industrial (IPC): Projetado para processamento de dados em alta velocidade, sistemas de visão e algoritmos complexos. Baseado em PC, executa Windows ou Linux com alta capacidade computacional.
As fronteiras entre PLC, DCS e IPC tornaram-se significativamente menos nítidas nos últimos anos.
Etapa 1: Defina a aplicação — máquina individual ou sistema para toda a planta, necessidades de controle de movimento em alta velocidade, requisitos críticos de segurança, número atual e futuro de E/S.
Etapa 2: Avalie o ecossistema da marca — Allen Bradley domina nas Américas, Siemens na Europa/Ásia, Mitsubishi no Japão e em mercados sensíveis a custos, ABB para automação de processos.
Etapa 3: Considere os custos de software — o hardware geralmente representa apenas 30 a 50% do custo total de propriedade; o licenciamento de software pode ser igualmente caro (Allen Bradley Studio 5000: US$ 5.000 a US$ 15.000 ou mais).
Etapa 4: Adequar os requisitos de E/S — calcular as entradas digitais, saídas digitais e sinais analógicos necessários, adicionando uma margem de 20% para expansão futura.
Etapa 5: Verificar os requisitos de comunicação — conectividade HMI, integração com a rede da planta (MES/ERP), comunicação com inversores/PLC e capacidade de acesso remoto.
Produtos principais:ControlLogix, CompactLogix, MicroLogix, SLC 500
Software de programação:Designer de Logix do Studio 5000
Comunicação:EtherNet/IP, ControlNet, DeviceNet, Modbus
Site:www.rockwellautomation.com
Produtos principais:SIMATIC S7-1500, S7-1200, S7-300, S7-400
Software de programação:Portal TIA
Comunicação:PROFINET, PROFIBUS, Modbus TCP/IP, OPC UA
Site:www.siemens.com
Produtos principais:MELSEC iQ-R, iQ-F, MELSEC-Q, MELSEC-F
Software de programação:GG Works3
Comunicação:CC-Link IE, Modbus TCP/IP, EtherNet/IP
Site:www.mitsubishielectric.com
Produtos principais:AC500, AC500-eco, AC700
Software de programação:Construtor de Automação
Comunicação:EtherNet/IP, PROFINET, Modbus TCP/IP, CANopen
Site:novo.abb.com/plc
Produtos principais:ControlLogix (através da Honeywell), Experion PKS
Software de programação:Estúdio Experion
Comunicação:EtherNet/IP, Modbus, OPC UA
Site:www.honeywellprocess.com
Produtos principais:NX1P2, NJ501, CP1H, CP1L
Software de programação:Sysmac Studio, Programador CX
Comunicação:EtherNet/IP, Modbus TCP/IP, USB
Site: www.omron-ap.com
Este guia tem fins educativos. Para orientações específicas de aplicação, consulte um engenheiro de automação qualificado ou entre em contato com a equipe de vendas técnicas da TZ TECH.

Continue lendo, mantenha-se informado, inscreva-se e convidamos você a nos dizer o que pensa.



Além disso, com a sua permissão, queremos colocar cookies para tornar a sua visita e a interação com o slOC mais pessoal. Para isso utilizamos cookies analíticos e publicitários. Com esses cookies, nós e terceiros podemos rastrear e coletar seu comportamento na Internet dentro e fora do super-instrument.com. Com isso nós e terceiros adaptamos super-instrument.com e anúncios ao seu interesse. Ao clicar em Aceitar você concorda com isso. Se você recusar, usaremos apenas os cookies necessários e, infelizmente, você não receberá nenhum conteúdo personalizado. Por favor, visite nossa Política de Cookies para obter mais informações ou para alterar seu consentimento no futuro.
Accept and continue Decline cookies












