
Programação do Beckhoff TwinCAT 3: Um guia prático para engenheiros que estão migrando de PLCs tradicionais
Um engenheiro que passou dez anos escrevendo lógica ladder em plataformas Allen Bradley e Siemens abre o TwinCAT 3 pela primeira vez e trava. A árvore de projetos fica dentro do Visual Studio. Os arquivos C++ compartilham espaço com o código do CLP. Não há slots de chassis para configurar, nem catálogo de hardware para consultar. O kernel em tempo real é instalado como um driver do Windows junto com o navegador. Essa é a programação do Beckhoff TwinCAT 3 — uma abordagem que prioriza o software para o controle industrial. A transição é difícil, mas a recompensa é uma plataforma com recursos que nenhum CLP tradicional consegue igualar.
O TwinCAT 3 (Tecnologia de Controle e Automação para Windows) transforma qualquer PC com Windows em um CLP (Controlador Lógico Programável) e controlador de movimento em tempo real. Ao contrário das plataformas tradicionais, onde o ambiente de execução reside em hardware proprietário, o TwinCAT 3 isola núcleos de CPU dedicados do Windows por meio de um driver de kernel em tempo real — agendamento bare-metal, não virtualização.
O ambiente de engenharia, TwinCAT 3 XAE, integra-se ao Microsoft Visual Studio como uma extensão do shell. O projeto de CLP reside em uma solução .sln padrão. O controle de versão funciona através do Git. Vários programadores podem trabalhar simultaneamente. Para engenheiros acostumados com o Studio 5000 ou o TIA Portal, a IDE parece um ambiente de desenvolvimento de software — porque de fato é.
A arquitetura rompe completamente com as limitações da norma IEC 61131-3. Módulos em C++ e MATLAB/Simulink são compilados como tarefas nativas em tempo real, juntamente com o código do CLP, compartilhando memória diretamente através do TcCOM (TwinCAT Component Object Model). O barramento de campo é EtherCAT — o protocolo determinístico da Beckhoff que interliga milhares de terminais de E/S em um único cabo com tempos de ciclo inferiores a um milissegundo. Sem nomenclatura de dispositivos PROFINET, sem arquivos GSDML, sem ferramentas de configuração de inversores de terceiros.
A pilha de software: TwinCAT 3 XAE (engenharia), TwinCAT 3 XAR (execução em tempo real) e o kernel de tempo real. O desenvolvimento é gratuito. Você pode escrever, compilar e simular programas de máquina completos em um laptop comum, sem nenhum hardware da Beckhoff.
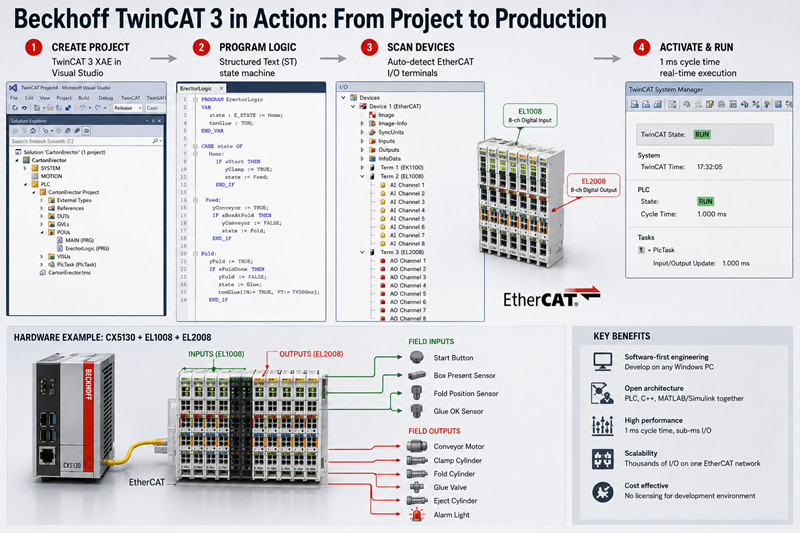
Uma integradora de embalagens em Jeddah implementou um sistema de controle para montagem de caixas de papelão utilizando um PC embarcado CX5130, entradas digitais de 8 canais EL1008 e saídas digitais de 8 canais EL2008. Todo o projeto — da instalação à operação das saídas — foi concluído em uma tarde.
Passo 1 — Instale o TwinCAT 3 XAE. Faça o download no site da Beckhoff. O instalador adiciona uma barra de ferramentas do TwinCAT ao Visual Studio e instala o driver de kernel em tempo real. Os shells do VS 2017, 2019 e 2022 são todos compatíveis.
Passo 2 — Crie um projeto. Arquivo → Novo → Projeto → "Projeto TwinCAT". A solução contém um nó PLC, um nó SYSTEM para configuração em tempo real e um nó I/O para dispositivos EtherCAT. A arquitetura de destino é x86 para PCs embarcados como o CX5130 e x64 para IPCs mais recentes.
Passo 3 — Escolha a linguagem de programação. Clique com o botão direito do mouse no nó do CLP e adicione um projeto de CLP. A Beckhoff usa por padrão o Texto Estruturado (ST), e a maioria dos programadores migra para ele porque o ST lida com arrays, máquinas de estado e lógica complexa de forma muito mais eficiente do que a lógica ladder. Dito isso, o Gráfico de Função Contínua (CFC) — uma linguagem gráfica de formato livre onde você coloca blocos em uma tela e desenha fios de sinal — é especialmente adequado para malhas de controle de processos. A Lógica Ladder (LD) continua disponível para intertravamentos discretos que as equipes de manutenção precisam solucionar problemas.
Para a máquina de montagem de caixas de papelão, o engenheiro escreveu uma máquina de estados em ST com estados para Início, Alimentação, Dobra, Colagem e Ejeção. Cada estado atribuía saídas ao EL2008 e lia entradas do EL1008.
Passo 4 — Escanear dispositivos EtherCAT. Clique com o botão direito em "Dispositivos" na árvore de E/S e selecione "Escanear". O TwinCAT 3 detectará automaticamente todos os terminais, drives e fatias de E/S conectados. O EL1008 aparecerá como um terminal de entrada de 8 canais. O EL2008 aparecerá como uma saída de 8 canais. Vincule os canais dos terminais às variáveis do CLP arrastando-os para a sua declaração de variáveis.
Etapa 5 — Ativar configuração. Clique em "Ativar configuração" na barra de ferramentas. O TwinCAT 3 compila o código do CLP, cria a configuração em tempo real e carrega tudo no ambiente de execução. Pressione "Login", selecione "Modo de execução" e o CX5130 executará a lógica do CLP no tempo de ciclo configurado — normalmente 1 ms.
O único problema: o laptop não conseguia se conectar ao CX5130 porque o NetID da AMS não estava roteado. Adicionar o NetID do laptop através da ferramenta de roteamento TwinCAT (ícone na barra de tarefas) resolveu o problema em menos de dois minutos.
O recurso que diferencia o TwinCAT 3 de todas as plataformas PLC tradicionais: C++ nativo. Você adiciona um módulo C++ diretamente ao projeto de tempo real, escreve código C++ padrão com extensões para tempo real e ele é executado como um objeto TcCOM no mesmo núcleo isolado do PLC — compartilhando memória por meio de ponteiros com latência zero.
Uma fabricante alemã de embalagens utilizou essa solução para realizar uma inspeção de tampas de garrafa baseada em OpenCV a 400 ppm. O módulo de visão em C++ troca resultados de aprovação/reprovação com a máquina de estados do CLP por meio de uma estrutura compartilhada. Uma abordagem tradicional — IPC externo via OPC UA — adicionaria de 10 a 50 ms de latência e exigiria a manutenção de um link de rede adicional.
O dispositivo TE1400 exporta modelos Simulink como módulos TcCOM. Um engenheiro de processos projeta uma cascata PID, clica em "Gerar Código" e o modelo é compilado em um objeto de tempo real no projeto TwinCAT 3. O programador de CLP mapeia as entradas e saídas do modelo para terminais de E/S reais. Uma estação de tratamento de água dos Emirados Árabes Unidos utilizou essa solução para um algoritmo de dosagem de coagulação — sensores de turbidez e pH conectados às entradas analógicas do EL3024, com a saída do modelo acionando as saídas analógicas do EL4024 para as bombas dosadoras. Integração total: um dia.
O NC PTP realiza posicionamento ponto a ponto padrão com perfis trapezoidais ou em forma de S — transportadores, atuadores lineares e posicionamento rotativo. O TwinCAT CNC é um kernel de controle numérico completo que suporta código G, cinemática de 5 eixos, compensação do raio da ferramenta e previsão de trajetória. Uma oficina CNC italiana opera usinagem de 5 eixos em um sistema TwinCAT CNC com servomotores AX5000 com ciclos de interpolação de 0,1 ms.
O TwinCAT HMI (TE2000) exibe dashboards HTML5/JavaScript a partir do IPC da Beckhoff. Qualquer dispositivo com navegador — PC de painel, tablet, smartphone — exibe as mesmas telas. A comunicação entre o servidor HMI e o PLC utiliza ADS através do roteador AMS local com latência inferior a um milissegundo. Não é necessário hardware proprietário para o painel.
O TwinCAT 3 direciona tarefas individuais para núcleos isolados específicos, com a preempção desativada. Um layout típico de um CX2040 quad-core: o núcleo 1 executa a máquina de estados do CLP a cada 1 ms, o núcleo 2 executa o PTP NC a cada 0,5 ms, o núcleo 3 executa um módulo de visão em C++ a cada 5 ms e o núcleo 0 gerencia o Windows. Se alguma tarefa em tempo real exceder seu ciclo, o TwinCAT reporta uma violação e entra em um estado de erro configurável. Para máquinas de encapsulamento de alta velocidade ou interpoladores CNC, o isolamento manual de núcleos elimina a instabilidade que desestabilizaria a máquina.
As licenças do TwinCAT 3 são compras únicas por dispositivo alvo. O TC1200 (somente para PLC, IEC 61131-3) custa aproximadamente US$ 700 para um CX5130. O TC1250 adiciona movimento NC PTP. O TC1300 desbloqueia o C++. O pacote completo para um CX2040 custa entre US$ 3.000 e US$ 4.000. O ambiente de engenharia é gratuito para desenvolvimento e simulação.
Computadores embarcados: CX7000 (preço inicial em torno de US$ 400), série CX2000 (US$ 1.500 a US$ 4.000), IPC ultracompacto C6030 (a partir de US$ 2.000). Terminais de E/S como EL1008 e EL2008 custam de US$ 80 a US$ 120 por módulo. O prazo de entrega padrão do catálogo é de 1 a 3 semanas.
Explore os PCs embarcados, terminais EtherCAT e soluções de licenciamento e PLC da Beckhoff em tztechio.com.
P: Posso executar o TwinCAT 3 em um laptop comum para desenvolvimento?
Sim. O TwinCAT 3 XAE instala em qualquer máquina Windows 10/11 x64. O kernel em tempo real roda em modo local usando agendamento de CPU isolado. Você pode escrever, compilar e simular programas completos de PLC, C++ e de movimento sem hardware da Beckhoff. Para simulação de E/S, escreva uma pequena rotina ST gerando feedback do sensor. Para movimento, habilite o modo de simulação de eixo na configuração do SISTEMA.
P: O TwinCAT 3 é mais difícil de aprender do que o Studio 5000 ou o TIA Portal?
O ambiente Visual Studio apresenta uma curva de aprendizado se você só tiver usado IDEs dedicadas a PLCs. Mas o fluxo de trabalho de escaneamento de E/S é mais simples do que o catálogo de hardware do TIA Portal, e engenheiros familiarizados com texto estruturado e práticas básicas de software (controle de versão, depuração, escopo de variáveis) geralmente acham o TwinCAT 3 intuitivo já na primeira semana. A ajuda F1 da Beckhoff é completa e contextual.
P: Preciso de um IPC da Beckhoff ou posso usar um PC de terceiros?
O ambiente de execução funciona em qualquer PC Windows x86, mas a Beckhoff valida o comportamento em tempo real apenas em seu próprio hardware. PCs de terceiros correm o risco de apresentar instabilidades devido a problemas com o chipset, gerenciamento de energia da BIOS ou drivers. Desenvolva e simule em qualquer laptop. Para produção, use os IPCs da Beckhoff — a diferença de custo é insignificante em comparação com a depuração de hardware não validado.
P: Posso misturar lógica ladder e texto estruturado no mesmo projeto?
Sim. Um único projeto de CLP pode conter PRGs, FBs e FCs em qualquer combinação de ST, LD, FBD e CFC. Uma rotina ladder pode chamar um bloco de função ST. Um diagrama CFC pode referenciar redes ladder. A compilação e a vinculação são independentes da linguagem.
P: O TwinCAT 3 é compatível com OPC UA e MQTT para a Indústria 4.0?
Sim. O TF6100 oferece funcionalidade de servidor OPC UA, expondo símbolos de PLC como nós configuráveis. O TF6701 adiciona publicação/assinatura MQTT. Ambos funcionam como módulos TcCOM no lado de tempo real, independentemente dos serviços do Windows.
P: Como são gerenciadas as atualizações de firmware e software em uma máquina em funcionamento?
O TwinCAT 3 suporta alterações online — modifique o código do PLC, adicione variáveis, ajuste a configuração da tarefa enquanto o ambiente de execução permanece em modo de execução. Alterações estruturais (novos dispositivos EtherCAT, modificações no tempo de ciclo, módulos C++) exigem uma "Ativação da Configuração" com uma breve reinicialização controlada. Para processos 24 horas por dia, 7 dias por semana, estão disponíveis configurações redundantes do TwinCAT com failover automático.

Continue lendo, mantenha-se informado, inscreva-se e convidamos você a nos dizer o que pensa.



Além disso, com a sua permissão, queremos colocar cookies para tornar a sua visita e a interação com o slOC mais pessoal. Para isso utilizamos cookies analíticos e publicitários. Com esses cookies, nós e terceiros podemos rastrear e coletar seu comportamento na Internet dentro e fora do super-instrument.com. Com isso nós e terceiros adaptamos super-instrument.com e anúncios ao seu interesse. Ao clicar em Aceitar você concorda com isso. Se você recusar, usaremos apenas os cookies necessários e, infelizmente, você não receberá nenhum conteúdo personalizado. Por favor, visite nossa Política de Cookies para obter mais informações ou para alterar seu consentimento no futuro.
Accept and continue Decline cookies












